무인 비행장치 시스템 강의 내용 정리
동영상 강의 한 번 듣고 돌아앉으니 다 잊어버렸다. 한 번 듣고 시험 볼 정도의 머리가 나는 못 된다. 그래서 또다시 동영상을 돌려 보며 기록한다. 동영상 보며 멈추고 기록하고 멈추고 기록한다. 무인 비행장치 시스템은 아래 목차의 하부 시스템으로 구성되어 있다.
목차
추진 시스템
- 모터/ 엔진
- 프로펠러/ 로터
- 배터리/ 연료
비행제어시스템
- 비행제어 컴퓨터
- 센서
- 구동기/ 조종면
지상통제시스템
- 통신 장치
- 지상통제장치
- 조종기/ 수신기
탑재체 시스템
- 카메라/ 김발
- 영상 전송 장치
기체 시스템
- 전원 공급장치
- 착륙 장치
1. 추진 시스템
1) 추진시스템(Propulsion) - 엔진
엔진에 많이 사용되는 3종류가 있다
1-1) 글로우 엔진 (Glow Engine)
![좌측이 [2행정 글로우 엔진],우측이 [4행정 글로우 엔진]](https://blog.kakaocdn.net/dna/bx4yTZ/btriZsk5xYd/AAAAAAAAAAAAAAAAAAAAANTcrSXtp1wm8kWQgXPnSU9DrlnQQdXDJ9sti8LIvvy_/img.png?credential=yqXZFxpELC7KVnFOS48ylbz2pIh7yKj8&expires=1785509999&allow_ip=&allow_referer=&signature=9GZXZ6NnaAX1uQxO7EJynHxwlQg%3D)
- 글로우 플러그를 통해 알코올 연료를 점화하여, 발생하는 폭발력을 이용해 회전력 발생시키는 엔진
- 이때 사용 엔진은 2 행정 또는 4 행정 엔진을 사용한다
- 연료 가격이 가솔린에 비해 고가이며, 주로 소형 기체에 사용함
1-2) 가솔린 엔진(Gasoline Engine)
![좌측이 [2행정 가솔린 엔진] 우측이 [4행정 가솔린 엔진]](https://blog.kakaocdn.net/dna/bUKr0F/btri1dgDc7n/AAAAAAAAAAAAAAAAAAAAAEZujW9zjf314EbA6V5ltIeJP1EO36cko71ObjfgtZKX/img.png?credential=yqXZFxpELC7KVnFOS48ylbz2pIh7yKj8&expires=1785509999&allow_ip=&allow_referer=&signature=yCt6LW7p1VKbW1qY%2BFDlLOQinL0%3D)
- 점화 플러그를 이용해 가솔린 연료를 점화하여 발생하는 폭발력을 이용해 회전력 발생
- 2 행정 또는 4 행정 엔진을 사용한다.
- 점화 플러그 스파크로 인해 전파 간섭이 발생될 수 있으며, 주로 대형 기체에 사용됨.
1-3) 제트 엔진(Jet Engine)
터빈과 압축기를 이용해 공기를 압축하고 케로신(등유) 연료를 연소하여 추진력이 발생한다.
큰 추력을 만들어낼 수 있어서 대형 항공기나 고속 항공기에 주로 사용되며 연료 소모율이 크다는 단점이 있다.
2) 모터
멀티콥터 무인 비행장치에 많이 사용된다.
직류(DC) 모터인 브러시(brushed DC) 모터 또는 브러시리스(brushless DC) 모터가 일반적으로 사용된다.
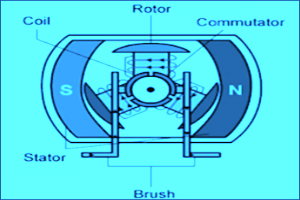
2-1) 브러시(brushed DC) 모터
- 모터 권선의 전자기력을 이용해 회전력을 발생시키는 모터이다.
- 브러시와 정류자를 이용해 전자석의 극성을 변경한다.
- 브러시로 인한 발열이 발생하며, 브러시 마모에 따른 수명의 한계가 있다는 특징이 있다.
2-2) 브러시리스 모터 (Brushless Motor, BLDC)
- 모터 권선의 전자기력을 이용해 회전력 발생
- 3상 전자 변속기(ESC)를 통해 전자석의 극성을 변경
- 브러시로 인한 발열 및 마모에 대한 단점이 해결되어 반영구적으로 사용이 가능하나 회전수 제어를 위한 별도의 전자 변속기(ESC)가 필요하다.
- Kv (속도 상수)에 따라 전압 1V를 인가했을 때 무부하 상태에서 회전하는 회전수(RPM)가 다르다.
참고: 무인 비행장치의 동력장치에는 액체연료를 사용하는 엔진과 배터리를 사용하는 모터가 있다. 엔진을 사용하는 소형 무인 비행장치의 경우, 주로 글로우 엔진으로 알코올 또는 경유가 사용된다. 중대형 무인 비행장치의 경우 휘발유를 사용하는 불꽃 점화 엔진이 주로 사용된다. 이들 엔진들에는 로터리 엔진, 2 행정 또는 4 행정 왕복엔진이 있다. 모터가 사용되는 경우 대부분 직류모터로 직류전원을 사용하지만 브러시(Brush)의 존재 유무에 따라 브러시(Brush) 모터와 브러시리스(Brushless) 모터로 분류된다.
브러시(Brush) 모터는 특별한 속도 조절 장치 없이 회전자에 전원을 제공하기 위한 브러시(Brush)가 달려있어 직 류 전원을 받아 권선(Wire)이 감겨있는 회전자가 회전력을 얻게 되는 직류(DC Motor) 모터이다.
브러시리스 직류 모터는 3 상전류를 사용하기 때문에 변속기 (ESC)가 필요하며, 영구자석인 중심부의 회전자(Rotor)와 권선(Wire)이 감겨있는 고정자(Stator, 스테이터)들로 구성되어 있다.
전류가 권선(Wire)으로부터 생성되는 자기장과 영구자석인 회전자 사이의 관 계에 의해 전기에너지가 회전자를 회전시킴으로써 기계적인 에너지로 변환된다.(출처: 국토교통부 자료, 초경량 비행장치 조종자 표준교재)
3) 전자 변속기(ESC : Electric Speed Controller)
- 브러시리스 모터의 회전수를 제어하기 위해 사용
- 일반적으로 3상 전류를 통해 모터 회전수 제어
- 배터리와 모터 사이에 위치하여 전력 전달
- 모터에 부하가 걸릴 경우 전류량이 증가하여 전자 변속기에 발열이 발생하기 때문에 주의가 필요
- 배터리의 인가전압과 모터의 소모 전류에 따른 적절한 전자 변속기 사용 필수
4) 프로펠러
프로펠러는 동력장치(모터, 엔진)에 의해 회전하며 프로펠러의 앞쪽이 뒤쪽보다 압력이 낮아지고, 앞쪽의 공기를 프로펠러 뒤쪽으로 밀어내며 추력을 발생시키는 장치이다.
단면이 에어포일 형태를 띠고 회전하는 날개 (즉, 회전 날개)를 가진다.
4-1) 프로펠러의 종류
1. 카본: 강도 및 강성이 크고 가볍지만 고가인 점이 단점이다.
2. 목재: 가볍고 효율이 좋지만 충격에 약한 단점이 있다.
3. 플라스틱(나일론): 강도 및 강성을 확보하기 위해서는 무게가 무거워져야 하지만 저렴하다.
4-2) 프로 셀러의 규격
직경*피치: 프로펠러 규격으로 단위는 인치이다.

- 10*6= 10인치의 직경과 6인치의 피치를 가진 프로펠러이다.
- 프로펠러의 직경: 프로펠러가 만드는 회전 면의 직경.
- 직경이 클수록 큰 추력의 발생이 가능하지만 회전 수 및 유입 공기 속도에 영향을 받는다.

- 프로펠러의 규격: 피치
- 프로펠러의 기하학적 피치: 가상의 유체 안에서 프로펠러가 1회전 했을 때 전진한 기하학적 거리이다.
- 피치가 작을수록 저속 비행에 효율적
- 피치가 클수록 고속비행에 적합하다고 알려져 있다.
4-3) 프로펠러의 회전 방향
- 회전 방향은 시계방향(CW, clockwise)과 반시계 방향(CCW, counter-clockwise)이 있다.
- 회전 방향에 따라 정 피치 또는 역 피치 프로펠러 사용해야 한다.
- 프로펠러의 회전 중심과 무게중심이 일치하지 않을 경우 진동이 발생
- 프로펠러의 진동은 모터 축 및 베어링에 힘을 가해 수명 단축한다.
- 프로펠러의 진동을 최소화하기 위해 밸런싱 필요함.
5) 로터(Roter)/ 테일 로터(Tail Roter)
- 프로펠러와 비슷하게 생겼고 역할도 비슷하면서 무인 헬리콥터에 장착되었는 추력을 발생시키는 장치
- 헬리콥터의 추력 및 양력 발생을 위한 회전 날개를 메인 로터라고 함
- 단면이 에어포일 형태
- 헬리콥터의 반토크를 상쇄하기 위해 꾀리 부분에서 측면 추력 발생
6) 배터리
- 무인 비행장치에서는 1차 전지, 2차 전지, 연료전지가 사용된다.
- 무인 비행장치에서 주로 사용되는 2차 전지에는 ①니켈카드뮴(Ni-CD), ②니켈수소(Ni-MH), ③리튬폴리머(Li-Po) 배터리가 있다.
- 에너지 밀도는 니켈 카드뮴 배터리가 가장 작고 리튬 폴리머 배터리가 가장 크다: sl Ni-Cd < Ni-MH < Li-Po

6-1) 리튬폴리머 배터리 규격
리튬폴리머 배터리의 정격 전압은 1셀 당 3.7V이다.
- (예) 2 cell(7.4V), 3 cell(11.1V), 4 cell(14.8V), 5 cell(18.5V), 6 cell(22.2V)
배터리 용량은 mAh 단위로 표기(해당 전류로 1시간 동안 사용 가능)
- (예) 2000mAh(2A로 1시간 만에 방전), 22000mAh(22A로 1시간 만에 방전)
방전율(C-rate)은 배터리 용량의 몇 배의 전류를 방전할 수 있는지 나타냄
- 예) ) 2000mAh (20C) 배터리의 경우 2A*20C = 40A 방전 가능
6-2) 리튬폴리머 배터리 사용 및 관리 방법
배터리는 충전기에서 분리하여 보관한다.
- 장기 보관 시 50~70% 상태로 방전 후 보관해야 한다.(완충 후 보관 X)
- 과충전 및 과방전 금지(충전 혹은 방전 중 배터리 상태 확인 필수임)
- 충격에 의한 손상을 입거나 부풀어 오른(스웰링) 배터리 사용 금지: 2.6V이하로 떨어질 경우 재충전 불가 또는 성능 저하됨.
- 충전 시 셀 밸런싱을 통해 셀 사이의 전압 관리 필요함.
- 전자적 저항 장치를 활용해 완전 방전 후 폐기할 것.
- 소금물을 이용해 방전할 경우 불화수소(불산)가 발생할 수 있므로 환기가 잘 되는 실외에서 방전 수행
2. 비행 제어 시스템
1) 센서
1-1) 관성 측정장치(IMU, Inertial Measurement Unit).
무인 비행장치의 자세각, 자세각과 속도, 가속도를 측정 또는 추정하는 센서이다. 소형 무인 비행장치에는 MEMS(Micro-electromechanical System) 센서를 사용한다. 일반적으로 ①3축 가속도계, ②3축 자이로스코프 또는 ③3축 지자기 센서를 탑재하고 있다. 무인 비행장치의 자세를 안정화하고 제어하기 위해 사용하며 진동에 의해 자세 오차가 발생할 수 있다.
- 가속도계(Accelerometer): 병진 운동역학을 이용해 가속도를 측정하는 센서이며, 중력 가속도를 이용해 비행체의 피치와 롤 자세 측정 가능하다.
- 자이로스코프: 코리올리스 가속도를 이용해 회전 각속도(혹은 회전 속도)를 측정하는 센서이다. 측정된 회전 속도를 이용해 자세각을 계산한다. 계산된 자세각에 오차가 누적되어 표류(Dtift)하는 경향이 발생하며 이를 제거하기 위해 가속도 센서와 지자계 센서의 정보를 활용한다.
- 지자계: 탑재되는 경우도 있고 탑재되지 않는 경우도 있다. 비행체의 기수 방향을 측정하고 자이로스코프의 요각을 보정하기 위해 사용한다. 주위 환경의 자기장(금속 또는 자성 물체), 전자기장에 민감하게 영한을 받는다.
1-2) 위성항법시스템(GNSS, Global Navigation Satellite System)

GPS(미국), GLONASS(러시아), GALILEO(유럽), BEIDOU(중국), 4가지가 있으며 요즘은 아래 4개 모두 사용한다.
- 위성과 수신기 사이의 거리 정보를 이용해 비행체 3차원 위치정보 획득
- 비행체의 이동 방향 및 이동 3차원 속도 측정 가능
- 무인 비행장치의 위치와 속도를 제어하기 위해 사용
- 위성항법시스템은 4개 이상의 위성이 수신되어야 위치 측정이 가능하다.
GNSS의 위치오차를 발생시키는 다양한 오차 요소 존재한다: 위성궤도 오차, 전리층 오차, 대류층 오차, 다중 경로 오차, 위성신호 교란 등
- GNSS의 위치 값에 오차가 발생할 경우 비행체가 불안정해질 수 있다.
- GNSS는 수평 위치보다 고도값에 오차가 크다.
- 실내에서는 위성 신호를 수신할 수 없음: 실내에서는 사용 불가.
1-3) 압력 센서
압력 고도계(Barometer는 대기압을 측정하여 고도 계산한다.
- 지면 대기압을 기준할 경우 지면 고도, 해수면 대기압을 이용할 경우 해수면 고도 측정 가능
기속 센서(Airspeed Meter)는 피토 튜브를 통해 측정된 전압(total pressure)과 정압(static pressure)의 차를 이용해 동압(dynamics pressure)을 구하여 속도 측정한다.
- 지면 기준 속도가 아닌 대기 기준 속도 측정. 지면 기준 속도가 아닌 대기 기준 속도를 측정한다.
2) 비행제어 컴퓨터 (FC, Flight Control Computer)
센서 신호를 처리해서 기체의 상태를 측정하고 조종 명령을 추종할 수 있도록 구동기(조종면, 모터 추력) 제어 명령 생성한다.
- - 경로점(Waypoint) 비행, 자동이착륙, 자동 귀환(RTH), 비행 안정화 등 수행 가능
- - 조종자가 일반적으로 사용하는 조종 모드(자세 모드, GNSS 모드, 고도 유지 모드)가 가능하도록 제어 수행
- - 페일세이프(Failsafe) 기능을 통해 조종사 통신 두절 시 자동 귀환 등 가능
- - 자세 안정화 및 자세 제어를 위해 IMU(+지자계) 센서 사용
- - 3차원 위치, 속도를 제어하기 위해 GNSS, 기속 센서 사용
- - 고도 제어를 위해 압력 고도계 또는 라이다(Lidar)를 결합해서 사용
- - 센서 측정값을 기반으로 제어하기 때문에 센서에 오차가 발생할 경우 제어 성능 저하
- - 제어 이득(Gain) 값을 적절히 조절하여 제어 성능 조절: 1) 비례 제어 이득 값이 클수록 제어 오차에 민감하게 반응, 2) 일반적으로 비례(P), 적분(1), 미분(D) 제어 이득 값 조절
3) 지상통제 시스템
※ 다음 글: 무인 비행장치 시스템 나머지 부분.
※ 참고: 이전 글 가운데 특히 중요한 글:
1~9, 11~13: 기재 생략